to start of with this project i bought a arduino uno SIK for my birthday..
it's pretty cool as there is tons of information on the net.
anyway there are some others who have converted robot arms or or bought kits but, for me that's not fun,
besides i'm more a mechanical sort of person than electrical.
for my robot arm i've used R/C servo motors (4) aluminium frame for lightness including the holes for weight reduction. and counter weight helps with the overall balance.

i had the arm working then left it for a while and pulled it apart and changed it for a camera pan but, not as exciting for me.

it produces a series of photos, which i stitched together with Huggin (http://hugin.sourceforge.net/)
huggin works best with less photo's (not 26 like i tried).
anyway i digress, so today i put it back together to try some adjustments i made to the IK code.
i use a Wii nunchuck to control the arm. a 40 x 2 character LCD with a i2c lcd backpack i purchased from Adafruit, it was designed for 16,2 lcd's with the connecter on the top or bottom but, as the lcd i have has the connector at the end
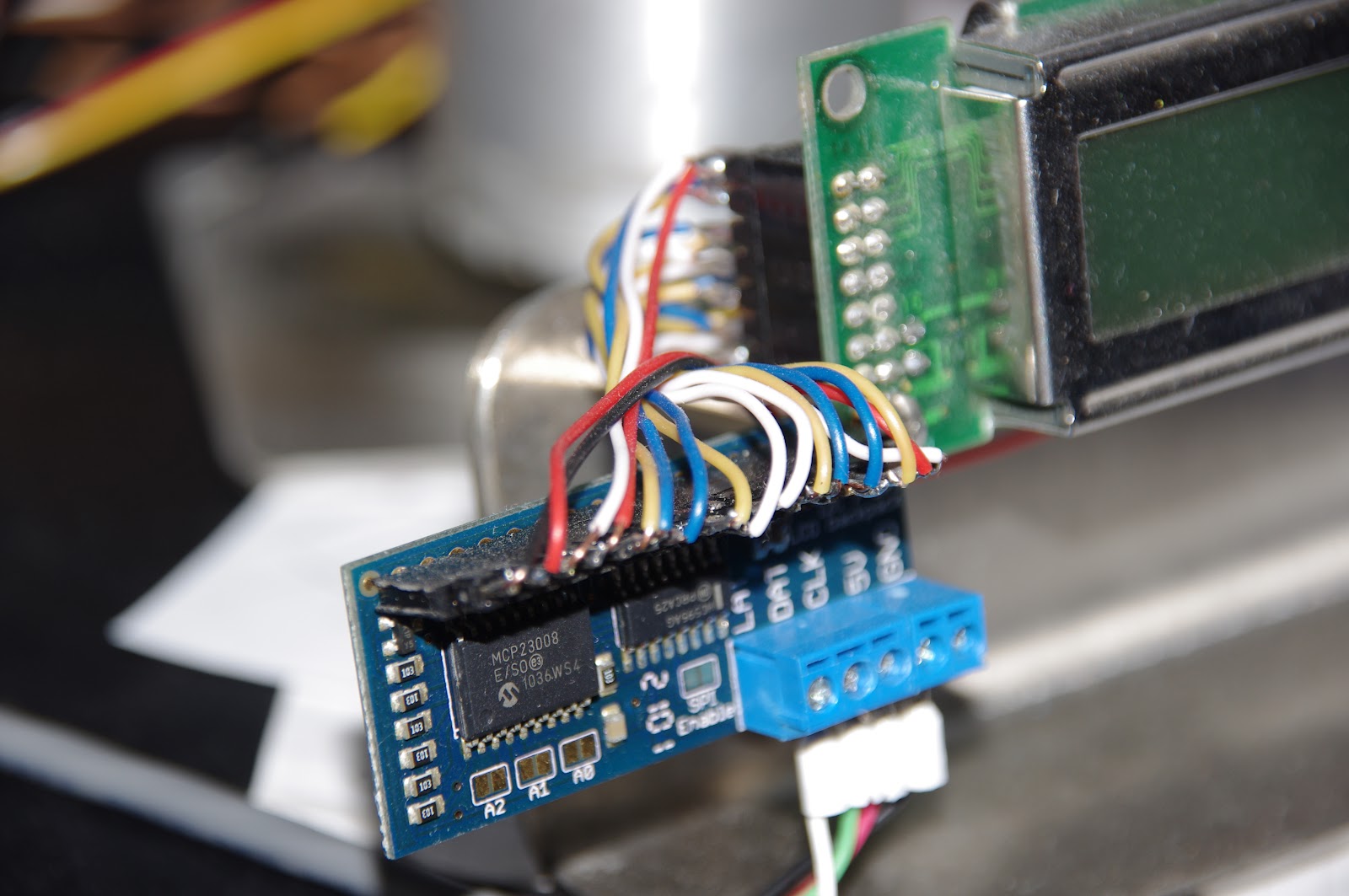
i fitted a homemade adapted cable to make it work with my 40,2.
looks like the adjustments i've made for the IK are not working and more tweaking is required
the trigonometry can be a pain to get right.. i'll get to it later.
No comments:
Post a Comment