A coupla weeks ago I bought a Leostick (http://www.freetronics.com/products/leostick) from the local Jaycar (there is 3 Jaycars equal distance from our home).
I had found a Menu library written to help with devolopment. Link(http://www.coagula.org/content/sites/default/files/source/menu_and_lcd_display.pde)
and adjusted it for my project.
Menu Structure
M_Menu.VV
RLed.VV>> BLed.VV>> GLed.VV
Rled On.VV>>RLed Off Bled On.VV>>BLed Off Gled On.VV>>GLed Off
Man>>Timer.VV Man>>Timer.VV Man>>Timer.VV
5mins>>10 mins>>15 mins>>20 mins
**Note** Manual time runs for 30 mins then turns off

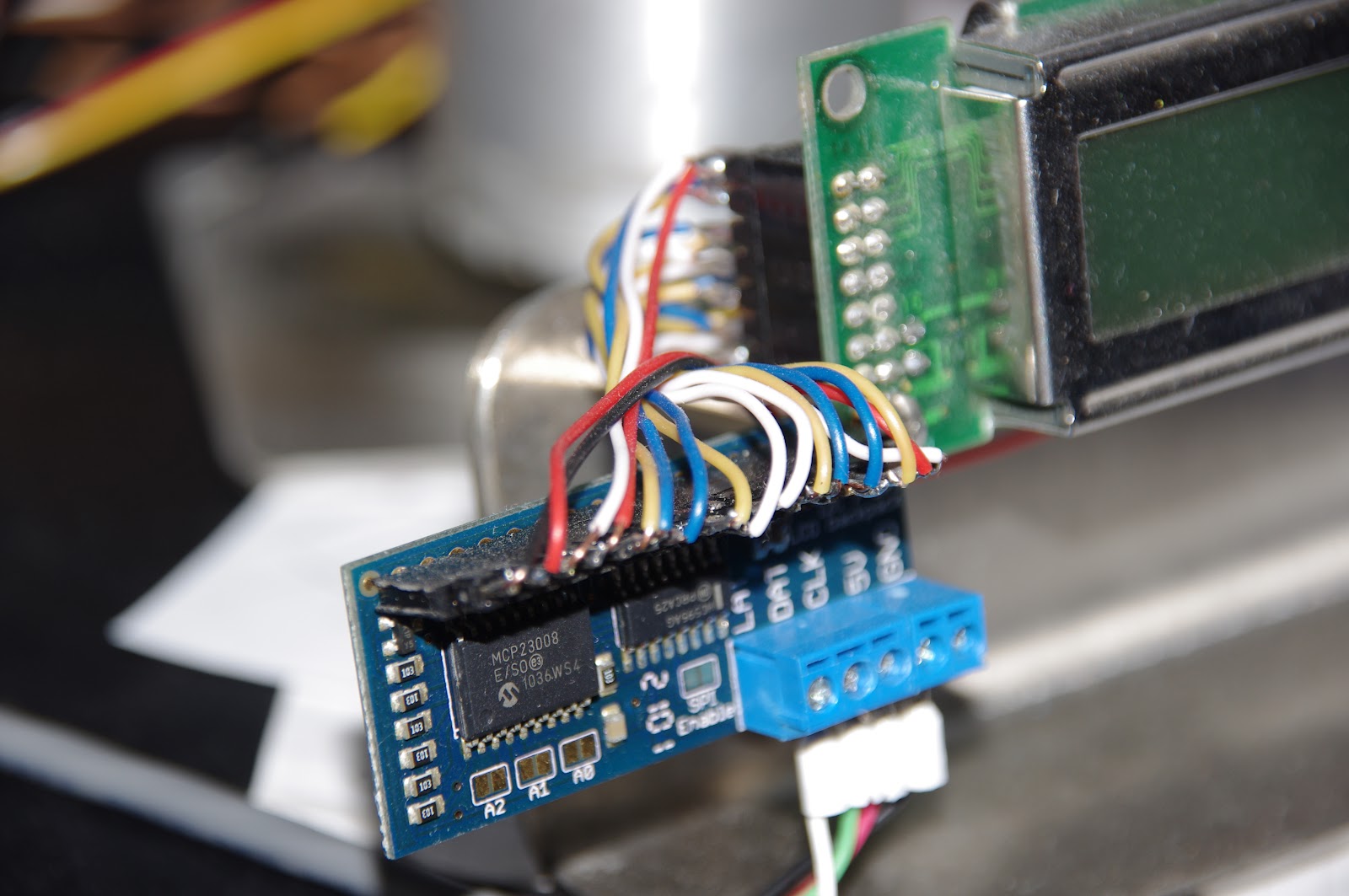
in the photo i using a 16x2 LCD at D7, D6, D5, D4, D3, D2, 3 momentary push buttons at D8, D11, D12, potentiometer for contrast and the the leostick, which has a RGB LED at D9, D10, D13.
so on my to do list was to add a real time clock and connect relays, put it all in a box and set up the pipes / sprinklers.
so yesterday i got a RTC (http://www.freetronics.com/collections/modules/products/real-time-clock-rtc-module) and 4 channel relay board (http://www.freetronics.com/pages/relay4-4-channel-relay-driver-module-quickstart-guide).
i spent all yesterday trying to get the RTC to work for me, but the library's i found didn't function correctly for me.
Tada the RTC finally works for me turns out the Serial baud rate was set wrong on the test program so when i ran in all got was jiberish, until until i set the baud rate correctly and shows the correct values, now i can move forward.
so the Library / Code i used is from here
http://soiling-detector.googlecode.com/files/DS3231updated.zip
link found here http://arduino.cc/forum/index.php/topic,57642.0.html.
to set the time / date the format used somewhat gathered from the sketch and the .cpp or .h files
is YYMMDDwHHMMSS , the 'w' is the day of week number 1-7 and i guessing 1=sun 2=mon but don't quote me on that, and put an x at the end as explained in the sketch.
now to make the RTC work with the leostick and the lcd display.